 抖音app正版短視頻
抖音app正版短視頻 手機淘寶app客戶端
手機淘寶app客戶端 快手2025最新版官方正版
快手2025最新版官方正版 網易云音樂app正版
網易云音樂app正版 愛奇藝app最新客戶端
愛奇藝app最新客戶端 新浪微博Weibo手機版
新浪微博Weibo手機版 小紅書app下載安裝
小紅書app下載安裝 金山辦公WPS Office手機官方最新版
金山辦公WPS Office手機官方最新版 京東商城官方客戶端
京東商城官方客戶端 qq下載2024最新版
qq下載2024最新版







編輯點評:陀螺儀采樣率設置器
專門為fps射擊類槍戰游戲打造的陀螺儀采樣率設置器,陀螺儀修復器app最新免費版,中文簡潔版,功能純粹好用,可以快速調整陀螺儀采樣率,根據游戲中的需要來高,是打FPS槍戰游戲必備的神器,軟件完全免費使用,歡迎下載收藏。

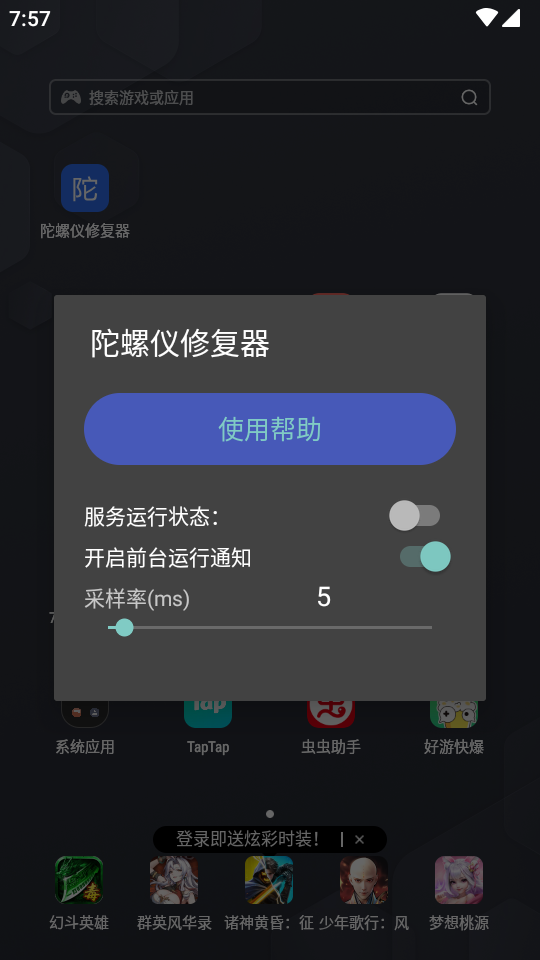
陀螺儀修復器怎么用
1、先在本站下載最新版本的軟件安裝好。
2、打開軟件后根據自己的需要來調節采樣率即可。
3、支持高前臺運行通知和服務運行狀態。
陀螺儀修復器采樣率是多少
1、陀螺儀配置,使用在線零偏

2、采集的陀螺儀數據

3、矯正之后的陀螺儀數據

4、效果異常的情況下確認
1、鏡頭視場角是否異常
2、陀螺儀方向標定是否正常,正常的情況下矯正之后的數據在0上下震動
3、確認在線零偏是否正常,
4、防抖模式用的錄像模式,record或者叫ipc
5、確認陀螺儀數據組數是否正常,
5.1,測試用的陀螺儀用的是 iim42652,用的fifo模式取數據,采樣率為1000HZ的時候間隔時間為5ms一次,時間太長陀螺儀數據會缺失,這是針對hi3516dv500的獲取數據的時候,不同的芯片不一樣,根據廠家提供說明配置,測試的時候配的50ms一次,幀間隔33ms,每次智能取到一部分數據,后間隔50ms的數據還沒取到
陀螺儀驅動中設置spi采集頻率,間隔多久采樣一次

5.2,hi3516dv300在vi獲取的陀螺儀數據,設置裁剪坐標之后在vpss做的裁剪
6、防抖效果盡量在曝光時間小于10ms的時候測,太小的話效果不佳
7、默認spi通信10M的通信數據,i2c的話數據低有可能數據拿到不及時
8. vi chn開低延時的時候,開陀螺儀防抖畫面會來回縮放,關閉vi chn的低延時就好
陀螺儀修復器采樣原理
物體在旋轉時,其旋轉軸在不受外力影響的情況下,旋轉軸所指方向不變。因此可以用來測量角位移或角速度。
1、核心工作原理:角動量守恒定律角動量守恒定律是指系統所受合外力矩為零時系統的角動量保持不變。
角動量的定義:物體矢徑和其動量的叉積
(1)矢量的計算:叉積和點積
假設a、b為兩個矢量,之間的夾角為θ,則
點積:a · b = abcosθ(標量)
叉積:a x b = absinθ(矢量,方向由右手螺旋定則決定,四指由a彎向b,大拇指方向即為叉積方向)
(2)角動量計算:物體矢徑和動量的叉積
r為矢徑,數值為物體到旋轉中心的距離,方向為旋轉中心指向物體的方向矢量;p為動量,數值為物體質量與線速度的乘積p=mv,方向為線速度v的方向;

以該圖的方向為例,依據角動量公式,可以得到角動量L的方向為豎直向上
(3)陀螺的角動量守恒
假設一個陀螺不受空氣阻力(合外力力矩=0),陀螺與地面的接觸面無限小(矢徑=0),則角動量的合力矩為0,即角動量守恒。
2、陀螺儀的基本特性:定軸性、進動性
(1)定軸性
當陀螺轉子以高速旋轉時,在沒有任何外力矩作用在陀螺儀上時,陀螺儀的自轉軸在慣性空間中的指向保持穩定不變,即指向一個固定的方向;同時反抗任何改變轉子軸向的力量。這種物理現象稱為陀螺儀的定軸性或穩定性。
(2)進動性
當轉子高速旋轉時,若外力矩作用于外環軸,陀螺儀將繞內環軸轉動;若外力矩作用于內環軸,陀螺儀將繞外環軸轉動。其轉動角速度方向與外力矩作用方向互相垂直。這種特性,叫做陀螺儀的進動性。
3、測量的物理量
(1)角速度
測量的物理量是偏轉、傾斜時的轉動角速度
(2)方向
俯仰角(pitch):繞x軸旋轉
偏航角(yaw):繞z軸旋轉
翻滾角(roll):繞y軸旋轉

4、核心參數
通用參數(傳感器)
線性誤差:傳感器測量值與實際物理值之間的誤差
分辨率:可檢測到的最小物理量單位
采樣頻率:單位時間內的采樣次數
陀螺儀重要參數
量程:為角速度單位(dps,degree per second)
靈敏度(刻度因子):最小分辨的角速度
靈敏度初始誤差
靈敏度動態誤差
非線性度:滿量程的誤差
初始零漂
零漂溫度系數
5、慣性導航原理慣性導航利用陀螺儀和加速度計測量載體在慣性參考系下的角速度和加速度,并對時間進行積分、運算得到速度和相對位置,且把它變換到導航坐標系中,這樣結合最初的位置信息,就可以得到載體現在所處的位置。
常見問題
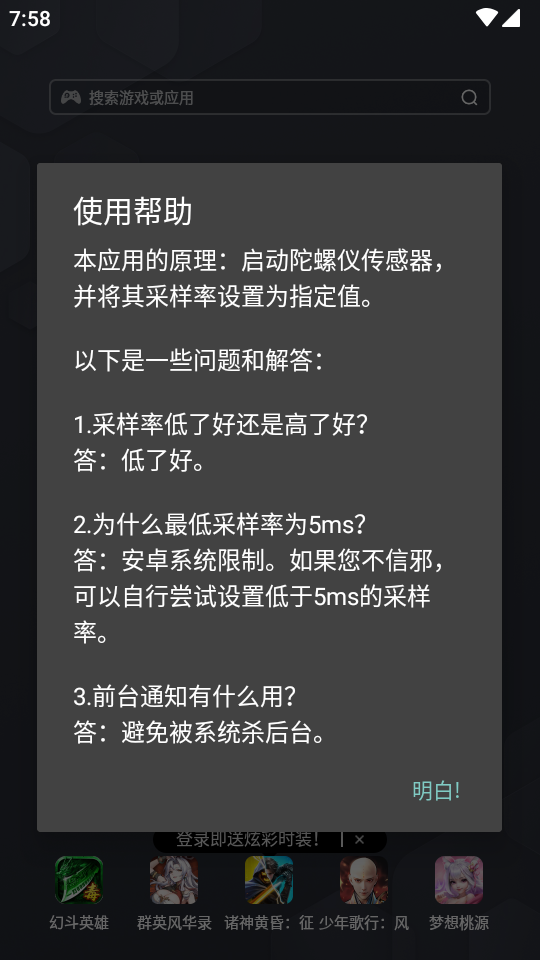
本應用的原理:啟動陀螺儀傳感器,并將其采樣率設置為指定值。以下是一些問題和解答:
1.采樣率低了好還是高了好?
答:低了好。
2.為什么最低采樣率為5ms?
答:安卓系統限制。如果您不信邪,可以自行嘗試設置低于5ms的采樣率。
3.前臺通知有什么用?
答:避免被系統殺后臺。
 Actxa智能手環軟件5.4.4 最新版
Actxa智能手環軟件5.4.4 最新版 Omni工具集軟件v1.2 安卓版
Omni工具集軟件v1.2 安卓版 一個工具助手軟件v1.0.2 安卓版
一個工具助手軟件v1.0.2 安卓版 Fishby軟件手機版V1.0.1 安卓最新版
Fishby軟件手機版V1.0.1 安卓最新版 大疆DJI Home手機版1.2.1 最新版
大疆DJI Home手機版1.2.1 最新版 嗖嗖云手機app最新版v2.5.01.013 安卓版
嗖嗖云手機app最新版v2.5.01.013 安卓版 微商截圖寶會員版無水印免費v3.1 最新版
微商截圖寶會員版無水印免費v3.1 最新版 xthzpro北幕工具箱手機版v3.2 安卓版
xthzpro北幕工具箱手機版v3.2 安卓版 創作精靈app官方版v1.0.3 安卓免費版
創作精靈app官方版v1.0.3 安卓免費版 騰訊翻譯君手表版v1.0.0.21 安卓版
騰訊翻譯君手表版v1.0.0.21 安卓版 YTDLnis中文版手機版v1.8.1 安卓版
YTDLnis中文版手機版v1.8.1 安卓版 椒鹽工具箱app正版v1.0.1 安卓手機版
椒鹽工具箱app正版v1.0.1 安卓手機版 天津大學融合門戶app官方版v1.0.0.5.2 安卓最新版
天津大學融合門戶app官方版v1.0.0.5.2 安卓最新版 快換圖標app手機版v1.0.1 安卓版
快換圖標app手機版v1.0.1 安卓版 花夢軟件庫簡潔干凈版v6.7 最新版
花夢軟件庫簡潔干凈版v6.7 最新版 LoFit手環連接app1.3.5 手機版
LoFit手環連接app1.3.5 手機版 夸克CK不限速提取器手機版v2.0 安卓版
夸克CK不限速提取器手機版v2.0 安卓版 小陽Tool軟件v1.0.2 最新版
小陽Tool軟件v1.0.2 最新版 模擬定位神器安卓版免費v2023.12.26 手機版
模擬定位神器安卓版免費v2023.12.26 手機版 MateAI解鎖VIP版v1.3.1 專業版
MateAI解鎖VIP版v1.3.1 專業版 好用魔方軟件v5.3.0006.20241127 安卓版
好用魔方軟件v5.3.0006.20241127 安卓版















 文檔掃描軟件
文檔掃描軟件 免費的手機掃描app
免費的手機掃描app 音樂播放手機軟件
音樂播放手機軟件 AI視頻制作軟件
AI視頻制作軟件 手機最好的圖片編輯器
手機最好的圖片編輯器 光速虛擬機安卓正版
光速虛擬機安卓正版
 ToDesk遠程軟件app
ToDesk遠程軟件app
 精品下載站app官方版
精品下載站app官方版
 豌豆莢應用商店安卓版
豌豆莢應用商店安卓版
 麻吉分身2024官方版
麻吉分身2024官方版
 藍莓工具箱
藍莓工具箱
 LuoJuBoxX聚箱工具箱
LuoJuBoxX聚箱工具箱
 智簡云iapp源碼平臺
智簡云iapp源碼平臺
 KDE Connect 安卓版手機版
KDE Connect 安卓版手機版
 玩機百寶箱官方正式版
玩機百寶箱官方正式版
熱門評論
最新評論