 阿里云盤app官方版
阿里云盤app官方版 快手極速版2024最新版
快手極速版2024最新版 快手2024最新版官方正版
快手2024最新版官方正版 百度地圖app手機(jī)最新版
百度地圖app手機(jī)最新版 墨跡天氣app官方版
墨跡天氣app官方版 美團(tuán)官方手機(jī)客戶端
美團(tuán)官方手機(jī)客戶端 釘釘手機(jī)版app
釘釘手機(jī)版app 中國農(nóng)業(yè)銀行app
中國農(nóng)業(yè)銀行app 光速虛擬機(jī)安卓正版
光速虛擬機(jī)安卓正版 美團(tuán)外賣app官方版
美團(tuán)外賣app官方版







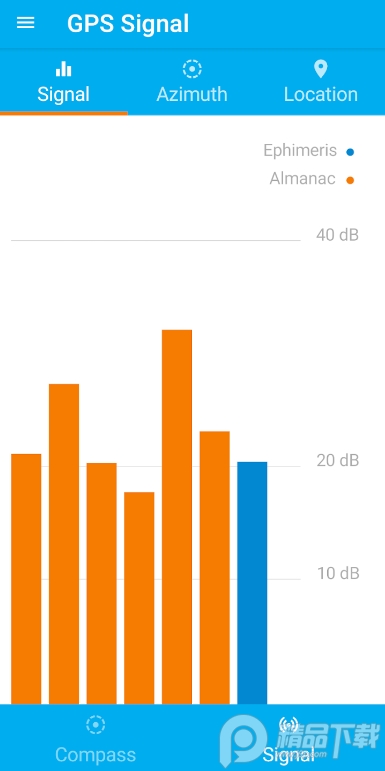
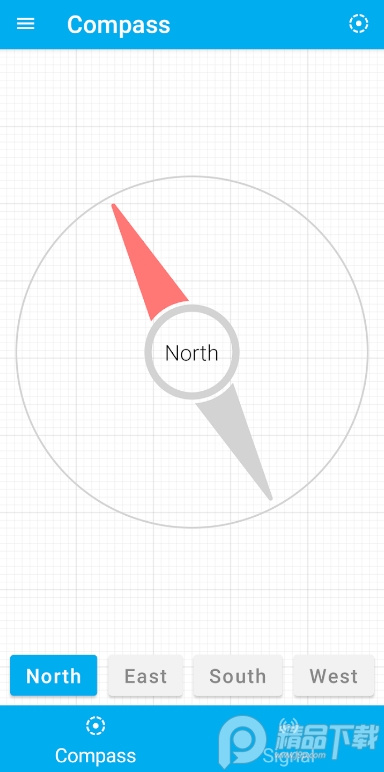
編輯點(diǎn)評(píng):專業(yè)高級(jí)且免費(fèi)的手機(jī)GPS+指南針工具
非常好用的一款手機(jī)免費(fèi)的gps指南針工具,Compass and GPS Tools高級(jí)免費(fèi)版,打開就可以直接使用,輕松易操作,可以更加便捷的看到導(dǎo)航的統(tǒng)計(jì),衛(wèi)星的統(tǒng)計(jì)等內(nèi)容,數(shù)據(jù)支持很到位。
版(Compass and GPS Tools)")
GPS指南針手機(jī)版主要功能
1、手機(jī)指南針。
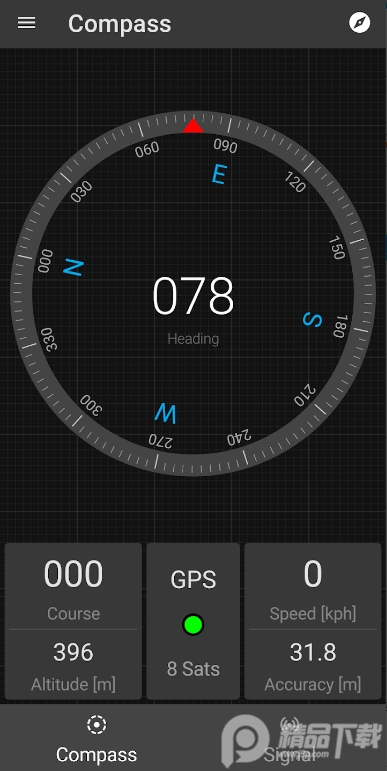
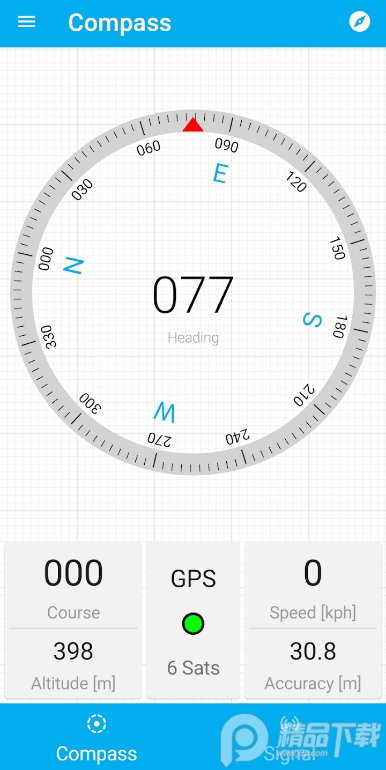
2、導(dǎo)航統(tǒng)計(jì) 航向、速度、高度、緯度和經(jīng)度。
3、衛(wèi)星統(tǒng)計(jì) 精度、信號(hào)、年歷、星歷、方位角、GPS 時(shí)間。
GPS指南針手機(jī)版軟件特色
1、非常簡潔的一個(gè)應(yīng)用軟件,打開即可直接使用。
2、沒有廣告,解鎖了專業(yè)功能,很強(qiáng)大的數(shù)據(jù)統(tǒng)計(jì)。
版(Compass and GPS Tools)")
3、精準(zhǔn)的各項(xiàng)數(shù)據(jù)支持,隨時(shí)都可直接使用。
GPS指南針手機(jī)版適用場景
需要一種簡單快捷的方法來獲取方向 例如:東南西北?
室內(nèi)區(qū)域的GPS 衛(wèi)星接收信號(hào)較弱。以良好的位置精度找到您家中/辦公室中的區(qū)域,以便您可以正確地叫出租車或在線訂購。
gps指南針原理介紹
GPS導(dǎo)航系統(tǒng)的基本原理是測量出已知位置的衛(wèi)星到用戶接收機(jī)之間的距離,然后綜合多顆衛(wèi)星的數(shù)據(jù)就可知道接收機(jī)的具體位置。要達(dá)到這一目的,衛(wèi)星的位置可以根據(jù)星載時(shí)鐘所記錄的時(shí)間在衛(wèi)星星歷中查出。
而用戶到衛(wèi)星的距離則通過記錄衛(wèi)星信號(hào)傳播到用戶所經(jīng)歷的時(shí)間,再將其乘以光速得到(由于大氣層電離層的干擾,這一距離并不是用戶與衛(wèi)星之間的真實(shí)距離,而是偽距(PR,):當(dāng)GPS衛(wèi)星正常工作時(shí),會(huì)不斷地用1和0二進(jìn)制碼元組成的偽隨機(jī)碼(簡稱偽碼)發(fā)射導(dǎo)航電文。
GPS系統(tǒng)使用的偽碼一共有兩種,分別是民用的C/A碼和軍用的P(Y)碼。C/A碼頻率1.023MHz,重復(fù)周期一毫秒,碼間距1微秒,相當(dāng)于300m;
P碼頻率10.23MHz,重復(fù)周期266.4天,碼間距0.1微秒,相當(dāng)于30m。而Y碼是在P碼的基礎(chǔ)上形成的,保密性能更佳。導(dǎo)航電文包括衛(wèi)星星歷、工作狀況、時(shí)鐘改正、電離層時(shí)延修正、大氣折射修正等信息。
它是從衛(wèi)星信號(hào)中解調(diào)制出來,以50b/s調(diào)制在載頻上發(fā)射的。導(dǎo)航電文每個(gè)主幀中包含5個(gè)子幀每幀長6s。前三幀各10個(gè)字碼;每三十秒重復(fù)一次,每小時(shí)更新一次。
后兩幀共15000b。導(dǎo)航電文中的內(nèi)容主要有遙測碼、轉(zhuǎn)換碼、第1、2、3數(shù)據(jù)塊,其中最重要的則為星歷數(shù)據(jù)。
當(dāng)用戶接受到導(dǎo)航電文時(shí),提取出衛(wèi)星時(shí)間并將其與自己的時(shí)鐘做對(duì)比便可得知衛(wèi)星與用戶的距離,再利用導(dǎo)航電文中的衛(wèi)星星歷數(shù)據(jù)推算出衛(wèi)星發(fā)射電文時(shí)所處位置,用戶在WGS-84大地坐標(biāo)系中的位置速度等信息便可得知。
可見GPS導(dǎo)航系統(tǒng)衛(wèi)星部分的作用就是不斷地發(fā)射導(dǎo)航電文。然而,由于用戶接受機(jī)使用的時(shí)鐘與衛(wèi)星星載時(shí)鐘不可能總是同步,所以除了用戶的三維坐標(biāo)x、y、z外,還要引進(jìn)一個(gè)Δt即衛(wèi)星與接收機(jī)之間的時(shí)間差作為未知數(shù),然后用4個(gè)方程將這4個(gè)未知數(shù)解出來。
所以如果想知道接收機(jī)所處的位置,至少要能接收到4個(gè)衛(wèi)星的信號(hào)。GPS接收機(jī)可接收到可用于授時(shí)的準(zhǔn)確至納秒級(jí)的時(shí)間信息;
用于預(yù)報(bào)未來幾個(gè)月內(nèi)衛(wèi)星所處概略位置的預(yù)報(bào)星歷;用于計(jì)算定位時(shí)所需衛(wèi)星坐標(biāo)的廣播星歷,精度為幾米至幾十米(各個(gè)衛(wèi)星不同,隨時(shí)變化);以及GPS系統(tǒng)信息,如衛(wèi)星狀況等。
GPS接收機(jī)對(duì)碼的量測就可得到衛(wèi)星到接收機(jī)的距離,由于含有接收機(jī)衛(wèi)星鐘的誤差及大氣傳播誤差,故稱為偽距。對(duì) CA碼測得的偽距稱為CA碼偽距,精度約為20米左右,對(duì)P碼測得的偽距稱為P碼偽距,精度約為2米左右。
GPS接收機(jī)對(duì)收到的衛(wèi)星信號(hào),進(jìn)行解碼或采用其它技術(shù),將調(diào)制在載波上的信息去掉后,就可以恢復(fù)載波。嚴(yán)格而言,載波相位應(yīng)被稱為載波拍頻相位,它是收到的受多普勒頻 移影響的衛(wèi)星信號(hào)載波相位與接收機(jī)本機(jī)振蕩產(chǎn)生信號(hào)相位之差。
一般在接收機(jī)鐘確定的歷元時(shí)刻量測,保持對(duì)衛(wèi)星信號(hào)的跟蹤,就可記錄下相位的變化值,但開始觀測時(shí)的接收機(jī)和衛(wèi)星振蕩器的相位初值是不知道的,起始?xì)v元的相位整數(shù)也是不知道的,即整周模糊度,只能在數(shù)據(jù)處理中作為參數(shù)解算。
相位觀測值的精度高至毫米,但前提是解出整周模糊度,因此只有在相對(duì)定位、并有一段連續(xù)觀測值時(shí)才能使用相位觀測值,而要達(dá)到優(yōu)于米級(jí)的定位 精度也只能采用相位觀測值。
按定位方式,GPS定位分為單點(diǎn)定位和相對(duì)定位(差分定位)。單點(diǎn)定位就是根據(jù)一臺(tái)接收機(jī)的觀測數(shù)據(jù)來確定接收機(jī)位置的方式,它只能采用偽距觀測量,可用于車船等的概略導(dǎo)航定位。
相對(duì)定位(差分定位)是根據(jù)兩臺(tái)以上接收機(jī)的觀測數(shù)據(jù)來確定觀測點(diǎn)之間的相對(duì)位置的方法,它既可采用偽距觀測量也可采用相位觀測量,大地測量或工程測量均應(yīng)采用相位觀測值進(jìn)行相對(duì)定位。
在GPS觀測量中包含了衛(wèi)星和接收機(jī)的鐘差、大氣傳播延遲、多路徑效應(yīng)等誤差,在定位計(jì)算時(shí)還要受到衛(wèi)星廣播星歷誤差的影響,在進(jìn)行相對(duì)定位時(shí)大部分公共誤差被抵消或削弱,因此定位精度將大大提高,雙頻接收機(jī)可以根據(jù)兩個(gè)頻率的觀測量抵消大氣中電離層誤差的主要部分,在精度要求高,接收機(jī)間距離較遠(yuǎn)時(shí)(大氣有明顯差別),應(yīng)選用雙頻接收機(jī)。
GPS定位的基本原理是根據(jù)高速運(yùn)動(dòng)的衛(wèi)星瞬間位置作為已知的起算數(shù)據(jù),采用空間距離后方交會(huì)的方法,確定待測點(diǎn)的位置。
假設(shè)t時(shí)刻在地面待測點(diǎn)上安置GPS接收機(jī),可以測定GPS信號(hào)到達(dá)接收機(jī)的時(shí)間△t,再加上接收機(jī)所接收到的衛(wèi)星星歷等其它數(shù)據(jù)可以確定以下四個(gè)方程式。
更新日志
26.1.5更新
Bug修復(fù)
UI mods










 SAP SuccessFactors Mobile思愛普軟件11.1.0 官方版
SAP SuccessFactors Mobile思愛普軟件11.1.0 官方版 易航商旅v1.0.0 安卓版
易航商旅v1.0.0 安卓版 宇視貝貝家長版客戶端v2.5.0 安卓手機(jī)版
宇視貝貝家長版客戶端v2.5.0 安卓手機(jī)版 曦康運(yùn)app1.0.0安卓版
曦康運(yùn)app1.0.0安卓版 SeeEasy監(jiān)控錄像機(jī)軟件v2.0.57 安卓最新版
SeeEasy監(jiān)控錄像機(jī)軟件v2.0.57 安卓最新版 小奔運(yùn)動(dòng)打卡軟件2.2.1安卓最新版
小奔運(yùn)動(dòng)打卡軟件2.2.1安卓最新版 行李打包清單軟件(PackPoint)v3.17.3 安卓手機(jī)版
行李打包清單軟件(PackPoint)v3.17.3 安卓手機(jī)版 中國編碼物品中心官方版2.3.2 手機(jī)版
中國編碼物品中心官方版2.3.2 手機(jī)版 i高新app官方版v1.0.7 安卓手機(jī)版
i高新app官方版v1.0.7 安卓手機(jī)版 百姓糧網(wǎng)交易平臺(tái)v1.4.2 安卓最新版
百姓糧網(wǎng)交易平臺(tái)v1.4.2 安卓最新版 蚌埠人社官方最新版1.3 手機(jī)版
蚌埠人社官方最新版1.3 手機(jī)版 怡禾線上問診軟件4.10.0 手機(jī)版
怡禾線上問診軟件4.10.0 手機(jī)版 元?dú)饧媛毠俜桨?.0.03 手機(jī)版
元?dú)饧媛毠俜桨?.0.03 手機(jī)版 隧e通app官方正版2.6.5 手機(jī)版
隧e通app官方正版2.6.5 手機(jī)版 慧生活798安卓版1.0.132安卓版
慧生活798安卓版1.0.132安卓版 掌上喀什app官方版v1.0.0 安卓手機(jī)版
掌上喀什app官方版v1.0.0 安卓手機(jī)版 防騙視伏App下載(Scameter+)v2.1.0 官方安卓手機(jī)版
防騙視伏App下載(Scameter+)v2.1.0 官方安卓手機(jī)版 開心虎app安卓版2.0.7 官方版
開心虎app安卓版2.0.7 官方版 綠聯(lián)儲(chǔ)能電源官方版v1.1.12 安卓最新版
綠聯(lián)儲(chǔ)能電源官方版v1.1.12 安卓最新版 小客車搖號(hào)查詢系統(tǒng)軟件v1.9 官方手機(jī)版
小客車搖號(hào)查詢系統(tǒng)軟件v1.9 官方手機(jī)版 北京汽車指標(biāo)app官方版v1.0 安卓最新版
北京汽車指標(biāo)app官方版v1.0 安卓最新版













 手機(jī)翻唱軟件
手機(jī)翻唱軟件 云手機(jī)免費(fèi)版
云手機(jī)免費(fèi)版 找暑假工的軟件推薦
找暑假工的軟件推薦 農(nóng)村信用社軟件合集
農(nóng)村信用社軟件合集 MT管理器下載
MT管理器下載 中國聯(lián)通手機(jī)版
中國聯(lián)通手機(jī)版
 中國移動(dòng)官方營業(yè)廳
中國移動(dòng)官方營業(yè)廳
 中國電信網(wǎng)上營業(yè)廳
中國電信網(wǎng)上營業(yè)廳
 小紅書app下載安裝
小紅書app下載安裝
 個(gè)人所得稅2024客戶端
個(gè)人所得稅2024客戶端
 菜鳥app客戶端
菜鳥app客戶端
 轉(zhuǎn)盤抽簽器安卓版
轉(zhuǎn)盤抽簽器安卓版
熱門評(píng)論
最新評(píng)論